近日,我院张卫华教授团队在智能车移动决策与规划领域取得新进展,相关研究成果“Two-Dimensional Following Lane-Changing (2DF-LC): A Framework for Dynamic Decision-Making and Rapid Behavior Planning”在《IEEE Transactions on Intelligent Vehicles》(TIV)上发表(DOI:10.1109/TIV.2023.3324305),TIV是国际智能车领域顶级期刊,中科院一区,影响因子IF8.2。

该研究详细探讨了一种针对智能车辆移动规划的二维跟驰变道模型。该模型融合了纵向和横向跟驰策略,利用跟驰模型的优势,提升了计算效率,并以确保避免碰撞为前提精确模拟驾驶行为。2DF-LC框架引入了基于S型函数的智能驾驶模型的双目标跟驰模型(DT-SIDM)和受社会力启发的横向移动模型(LM-SIDM),在动态决策和路径规划领域上具有显著优势。相较于传统的分层运动规划系统(HMPS)和集成学习模型(IMLC),2DF-LC在降低模拟轨迹误差和增强安全性方面具有出色表现,并且生成轨迹的加速度曲线更加平滑,可以显著提高乘客的乘坐体验。在CarSim测试中,2DF-LC框架表现出了优优异的执行性能,为智能车辆的动态决策和行为规划提供了坚实的理论支持与实用指导。

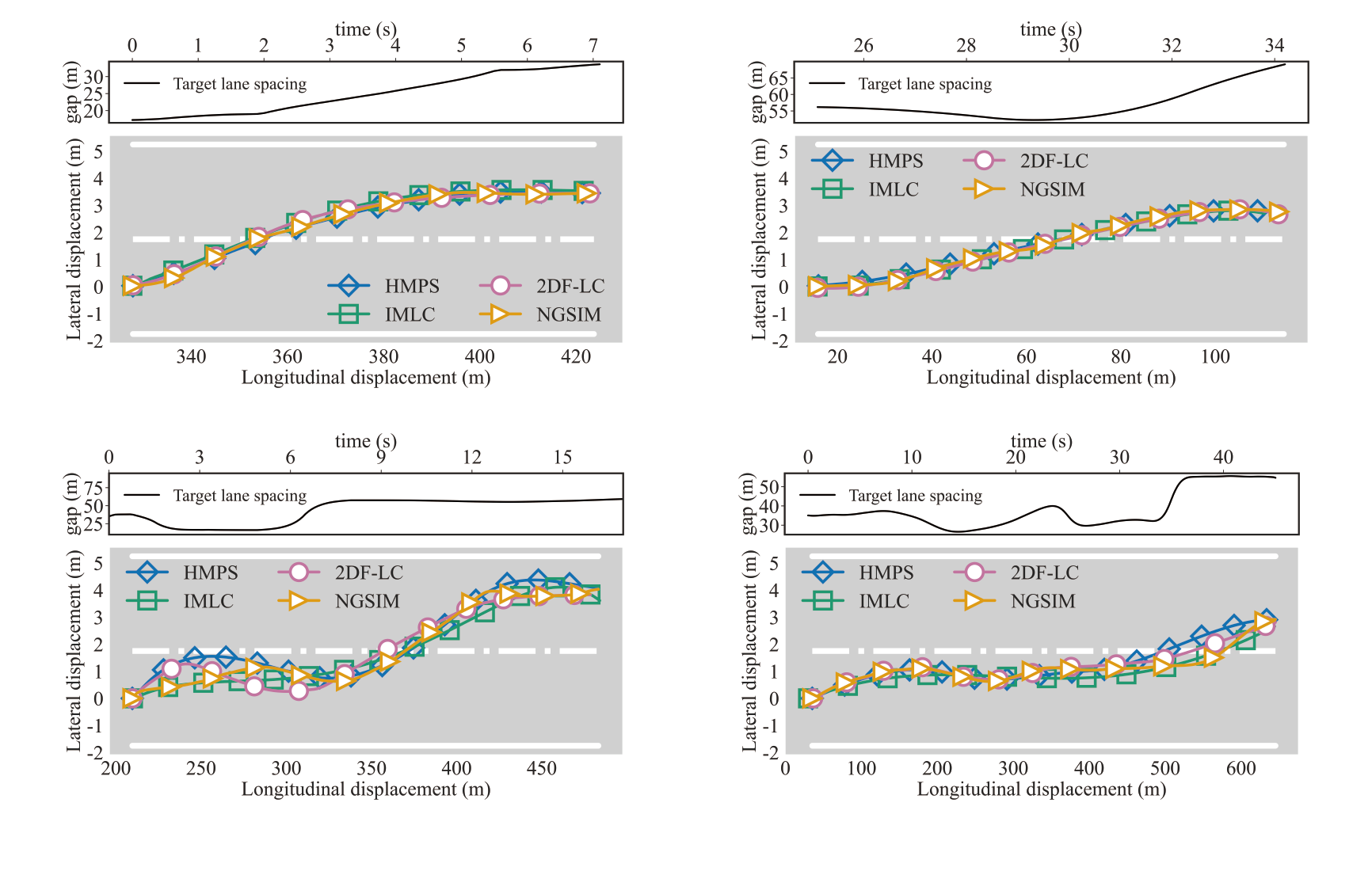
以高度模拟人类驾驶行为为切入点,该研究对2DF-LC框架进行了大量仿真测试,并通过校准个性化参数来实现与NGSIM数据集中平滑位移轨迹的高度相似性。其中,仿真测试的所有轨迹模拟平均误差为0.052m,这充分证明2DF-LC在模拟人类驾驶行为方面具有出色表现。为追求轨迹规划的时效性和及时性,该研究不断改进2DF-LC框架,最终使得2DF-LC的平均计算时间为0.003秒,远远快于传统的变道轨迹规划方法,这表明2DF-LC在适应复杂交通环境下能够快速地生成合理轨迹。
该项研究得到了国家自然科学基金(52372326)、安徽省自然科学基金(2208085ME148)、安徽省重点研发计划项目(2022k07020005)的支持。本校博士生陈星宇为第一作者,张卫华教授为第二作者,柏海舰副教授为通讯作者。
论文链接:https://ieeexplore.ieee.org/document/10285029


