近期,汽车与交通工程学院张卫华教授团队在国际著名学术期刊《Transportation Research Part A》、《Transportation Research Part C》、《Accident Analysis & Prevention》、《IEEE Transactions on Network Science and Engineering》连续发表四篇研究论文,在智能网联与车路协同环境下的快速路交通管控与城市路网协同优化领域取得系列原创性研究成果,为解决城市快速路交通拥堵与交通安全问题提供了新思路。
近年来,随着道路车辆数量的增加,大城市快速路网的交通压力与安全隐患日益凸显,而智能网联汽车与车路协同技术的发展,给城市快速路交通有效管控带来了新的机遇。张卫华教授团队面向车路协同环境下快速路交通的关键挑战,围绕“路段优化—合流区管控—连续汇入区调控—跨系统协同”四个方面开展深入研究,构建了较为完整的快速路系统交通流管控优化框架。
首先,在快速路基本路段层面,研究团队针对网联自动驾驶汽车(CAV)专用车道在低渗透率下利用率不足的问题,提出了一种基于模型预测的动态定价(MPCT)共享策略(图1所示)。该方法允许人工驾驶车辆付费使用专用道,并在模型预测控制框架下,结合驾驶员时间价值差异实时优化收费,引导车流动态分配。研究结果表明,该策略不仅提高了快速路资源利用效率,还在交通安全和能源消耗方面表现优异,为CAV发展初期的快速路专用道管理提供了灵活而高效的解决方案。
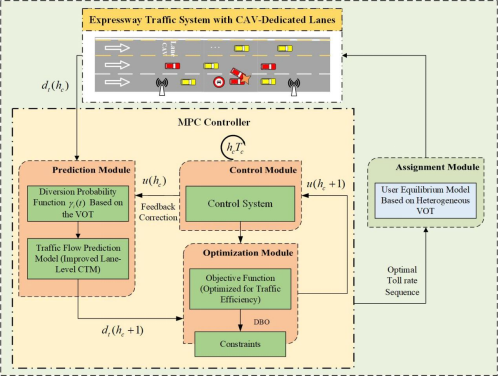
图1 MPCT策略控制框架
其次,针对传统交通控制方法难以应对混驾交通流车辆间相互作用导致的快速路合流区的安全与效率瓶颈问题,研究团队提出了一种基于模型预测的协同控制策略(图2所示),并创新性地将Transformer神经网络引入快速路交通控制,用于精准预测不同条件下的交通演化趋势,同时构建了自适应权重模型,实现对交通安全与效率目标的动态平衡。实验分析显示,该方法能够显著改善混驾车流下的运行状态,有效缓解因车辆交互带来的交通拥堵与安全风险。
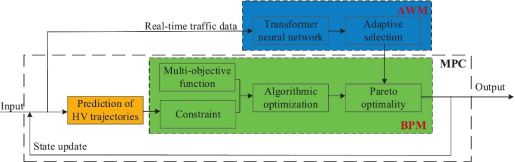
图2 基于模型预测的交通协同控制策略框架
进一步,在快速路连续汇入区这一复杂场景下,研究团队提出了主线可变限速(VSL)与匝道流量控制(RM)相结合的双层协同框架(图3所示)。该框架将安全、效率与能源消耗纳入统一模型进行优化,突破了传统方法只关注单一目标的局限,实现了主线与匝道交通流的系统性调控。研究结果表明,该方法能有效降低快速路连续合流碰撞风险,缓解交通拥堵并减少交通能耗,为快速路瓶颈路段交通流管控的多目标优化提供了可行路径。
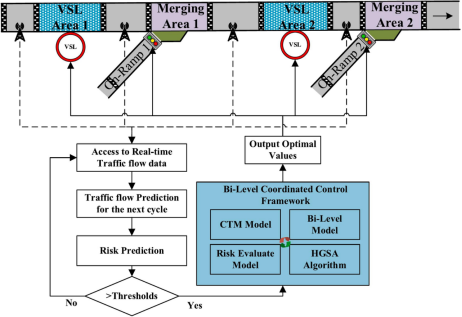
图3 可变限速-匝道控制双层控制框架
在更大范围内,研究团队还面向城市普通路网与快速路网之间的跨系统干扰问题,提出了一种复合路网交通流协同控制方法。该方法整合宏观基本图(MFD)与元胞传输模型(CTM),在模型预测控制框架下联合优化区域边界控制、匝道调节与限速措施(图4所示)。以实际特大城市路网为案例的研究表明,该策略显著改善了跨路网系统交通拥堵,实现了城市普通路网与快速路系统交通的协调运行,为特大城市路网跨系统治理和全局最优控制提供了系统性解决方案。
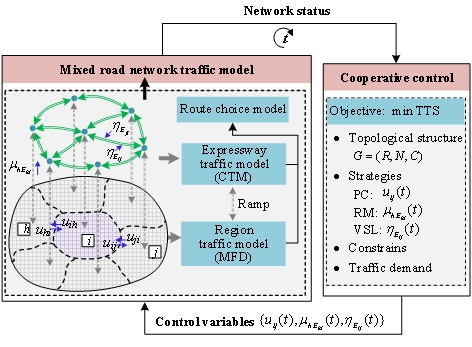
图4 城市多区域-快速路复合路网的交通流协同控制框架
该系列研究由张卫华教授、丁恒教授主导,青年教师、博士研究生张朗和邸允冉、硕士研究生张凡和张海洋等协作下共同完成。上述成果既体现了汽车与交通工程学院交通工程研究所在智能网联交通与车路协同领域的持续引领,也展现了团队青年学者和研究生在智能交通科研攻关中的积极作用。整体来看,这些成果充分彰显了团队在国际智能交通研究中的学术贡献和人才培养成效。
上述系列研究的开展,也得益于研究团队与美国威斯康星大学麦迪逊分校冉斌教授、同济大学石皓天副教授等开展的合作,全面依托城市交通管理集成与优化技术公安部重点实验室、安徽省智能交通重点实验室等高水平科研平台,相关研究工作得到了国家自然科学基金、安徽省重点研究与开发计划、安徽省住房和城乡建设科技计划、合肥市自然科学基金等项目支持。
论文链接:https://doi.org/10.1016/j.tra.2025.104567
论文链接:https://doi.org/10.1016/j.trc.2025.105298
论文链接:https://doi.org/10.1016/j.aap.2025.107924
论文链接:https://doi.org/10.1109/TNSE.2025.3580759


